GM-VSAE#
[ICDE2020] Online anomalous trajectory detection with deep generative sequence modeling
1. 摘要#
轨迹序列异常检测是轨迹序列领域中的重要任务之一,在诸多方面都有应用的场景。比如在城市中从\(A\)地点打车到\(B\)地点,一般而言有几条被大量司机驶行的固定路径,如果某用户打车时司机的轨迹并非与这些固定路径相似,那么极有可能是被绕路了,也即轨迹序列异常。
在此,作者提出一种轨迹序列异常计算算法——GM-VSAE(Gaussian Mixture Variational Sequence AutoEncoder),相比于前人的方法,作者认为GM-VSAE存在以下优点:
能够捕获复杂轨迹序列的表征。
在隐藏状态空间中使用高斯混合分布表征不同类型的路径。
基于轨迹生成的在线检测(detection-via-generation)。
2. 预备知识#
轨迹序列定义为按时间顺序采集的GPS坐标点序列 \(P=\{p_1 \to p_2 \to \ldots \to p_n\}\)。路径表示轨迹序列在物理世界中所遵循的连续路线,一条轨迹序列可以被视为路径的一条采样样本。
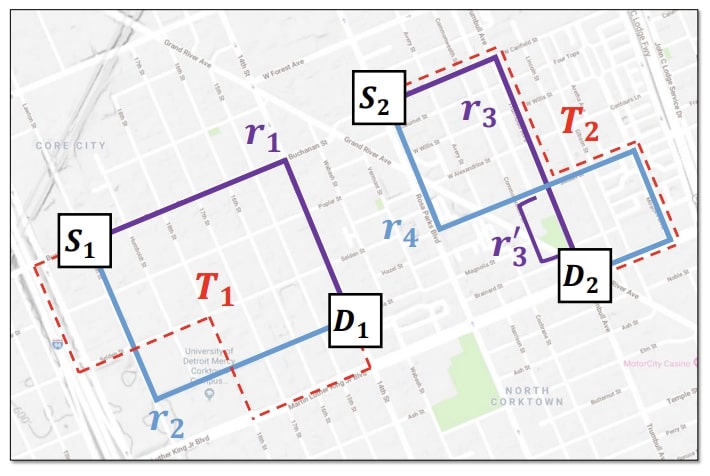
通常,在某个固定行程(即某两位置之间的行程)中的一条轨迹(trajectory),如果没有遵循正常路径(normal route)的话,则可以被认为是异常轨迹。注意,在某固定形成之间亦可以存在多条正常路径。下图中 \({S_1, S_2}\)表示行程的起点, \({D_1, D_2}\)表示行程的终点,其中 \({T_1, T_2}\) 两条轨迹序列被视为是异常轨迹(anomalous trajectory)。
3. GM-VSAE#
3.1. 定义#
为了后续的GM-VSAE的建模,作者在此作如下定义:
\(r\):路径,定义\(p(r)\)为一条路径被轨迹行驶的概率。更大的\(p(r)\)意味着\(r\)更有可能是一条正常路径。
\(r_*\):正常路径,定义\(p(T|r_*)\)表示轨迹\(T\)由正常路径\(r_*\)生成的概率。更小的\(p(T|r_*)\)意味着\(T\)更有可能是一条异常轨迹。
在线异常序列检测:给定一条序列 \(T\) ,其起点是 \(S_T\),终点是 \(D_T\) ,在线异常序列检测任务是:(1)挖掘 \(S_T\)和\(D_T\)之间的正常路径;(2)计算当前轨迹由正常路径生成的概率\(p(T|r_*)\),通过该值来在线判定是否是异常轨迹。
为了实现上文中的两个目的,受VAE启发,作者提出了GM-VSAE算法,即高斯混合变分序列自编码器,该算法可以实现如下三个功能:
以向量来表征路径在隐空间中的分布。
建模路径的分布 \(p(r)\)。
给定路径,生成该路径下的一条轨迹序列(采样\(p(T|r)\))。
3.2. 方法建模#
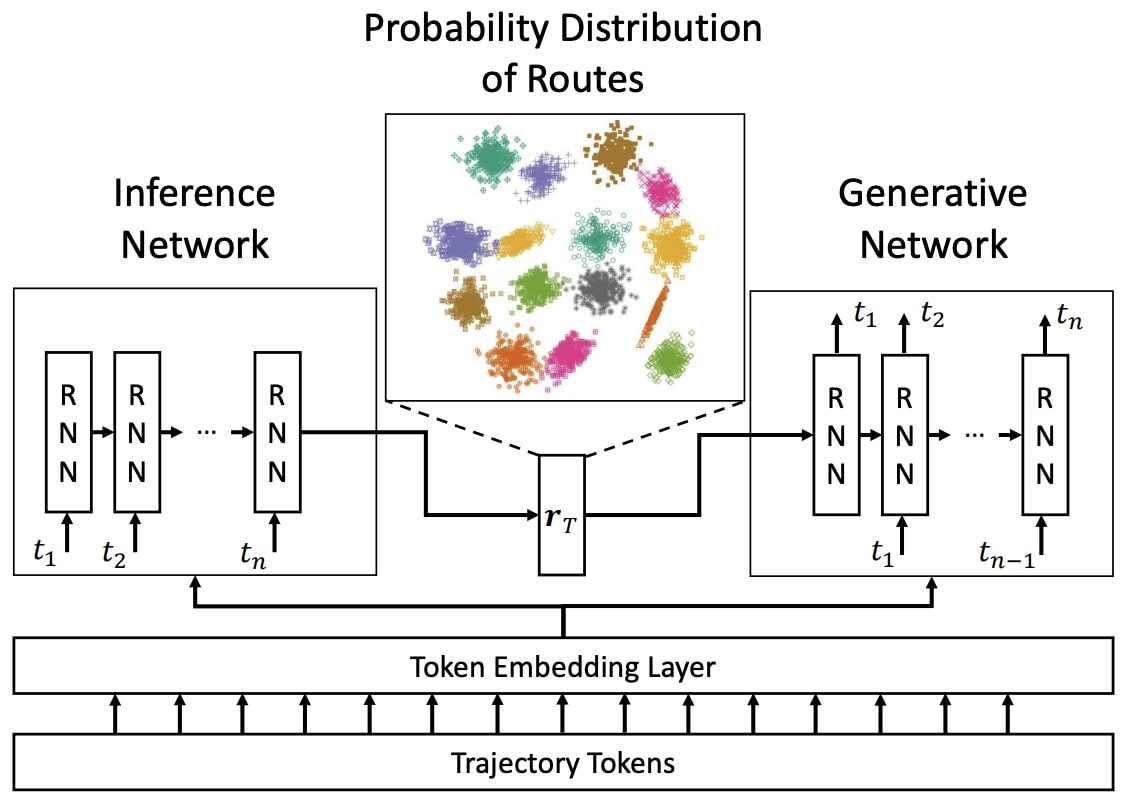
GM-VASE原理架构图如下:
嵌入表征层#
原始的轨迹序列无法直接作为模型的输入,需要先对地图构建网格系统将轨迹转换为离散的词元序列,然后可使用词嵌入模型来构建嵌入表征层,将词元序列中的每一个词元转换为嵌入向量(embedding)作为GM-VSAE后续模块的输入。具体细节可以参见Word2Vec,此处不做赘述。
编码器#
图2中Inference Network即为编码器,定义为\(q_\phi(r \vert T)\),即在给定轨迹序列\(T=(t_1, t_2, \ldots, t_n)\)的情况下,计算其在隐空间中的向量表示\(r_T \in \mathbb{R}^M\)。
在GM-VSAE中编码器使用的是RNN系列的模型。具体地,在第 \(i\) 步时,编码器输出隐藏状态(hidden state):
其中,\(h_i \in \mathbb{R}^K\),\(K\)即为隐藏层的维度。
参照VAE中对隐藏状态的建模,GM-VSAE将\(q_\phi(r \vert T)\)建模为高斯分布,如下:
其中,\(\mu_T \in \mathbb{R}^M\),\(\sigma_T \in \mathbb{R}^M\),\({\mu_T, \sigma_T}=g_1(\mathbf{h}_n)\),\(g_1\)即为编码器的模型部分。
所以,我们将轨迹序列\(T\)作为编码器的输入,此时编码器的\(g_1\)输出的均值\(\mu_T\)和标准差\(\sigma_T\)即为轨迹\(T\)在隐藏状态空间中的向量表征。
Tip
此处编码器的建模和下文隐藏状态空间的建模,其基本原理在Auto-Encoding Variational Bayes一文中有更为详细的讲解。
在T2VEC中亦有针对轨迹领域的建模方式讲解。
隐藏状态空间#
通过编码器可以得到轨迹\(T\)在隐空间中的向量表示,但是我们依旧无法区分在隐藏状态空间中哪些路径是正常的。因此,作者使用高斯混合分布来对隐藏路径进行建模。
作者假设在隐藏状态空间中存在\(C\)中不同类型的路径\({r}\)分布,其中不同类型的路径在物理世界中有不同的含义,比如道路类型、旅行区域等等。为了建模不同类型的隐藏路径分布,作者定义了如下两个概率分布:
\(p_\gamma(c)=Mult(\pi)\),其中\(\pi \in \mathbb{R}^C\)。\(p_\gamma(c)\)即为不同类型的隐藏路径在隐藏状态空间中的概率分布。
\(p_\gamma(\mathbf{r}|c) = \mathcal{N}(\mu_c, \sigma_c^2\mathbf{I})\) ,其中\(\mu_c \in \mathbb{R}^M\),\(\sigma_c \in \mathbb{R}^M\)分别表示该高斯分布的均值和标准差。\(p_\gamma(\mathbf{r}|c)\)用以建模在路径类型\(c\)中路径下\(\mathbb{r}\)出现的概率。
可见,上述两个概率分布共同来对隐藏状态空间建模,即\(p_\gamma(\mathbf{r},c)=p_\gamma(\mathbf{r} \vert c)p_\gamma(\mathbf{c})\),隐藏状态空间模型的参数是\(\gamma=\{\mathbf{\pi}, \mathbf{\mu_c}, \mathbf{\sigma_c}\}\)。
由于新增了隐藏路径类型\(c\)这个变量,所以可以将编码器推理路径\(\mathbf{r}\)扩展为推理路径\(\mathbf{r}\)和路径类型\(c\),即\(q_\phi(\mathbf{r}, c|T)\)。借助平均场近似(Mean-field approximation),我们可以将其分解为如下:
其中\(q_\phi(c|T)\)可以近似为如下:
其中,\(r_T\)采样于分布\(q_\phi(\mathbf{r}|T)\)。
解码器#
解码器的任务是根轨迹序列\(T\)在潜在空间中的向量表示,来逐步生成轨迹\(T'\)。为此,作者进行了如下建模,对于第\(i\)步的序列点\(t_i\)的生成,其与下面两个因素相关:
隐藏路径\(\mathbf{r}\)
先前的序列\(t_{<i}=t_1 \to t_2 \to \ldots \to t_{i-1}\)
所以我们有:
在解码器逐步解码的范式下,将先前的序列\(t_{<i}\)和隐藏路径\(\mathbf{r}\)编码成隐藏状态向量(hidden state vector):
其中\(g_i \in \mathbb{R}^k\),\(f_2\)即为编码器的模型部分,在GM-VSAE中为RNN系列的模型。上述的公式可以进一步写成如下:
Note
多项式分布(Multinomial distribution)用于描述一次实验中从多个类别中选择的情况。在每个类别上都有相应的概率。具体来说,如果你有\(K\)个类别,每个类别\(i\)的选择的概率为\(p_i\),且满足\(\sum_{i=1}^Kp_i=1\),那么从这些类别中采样就是在多项式分布的框架下进行的。
3.3. 目标函数#
在GM-VSAE中,有如下参数需要优化,分别是嵌入表征层,编码器\(\phi=\{f_1(\cdot),g_1(\cdot)\}\),潜在路径模型\(\gamma=\{\mathbf{\pi},\mathbf{\mu}_c,\mathbf{\sigma}_c\}\)以及解码器\(\theta=\{f_2(\cdot),g_2(\cdot)\}\)。
参照VAE,在GM-VSAE中目标函数是轨迹序列的最大似然函数:
在这里定义边际似然下界(ELBO)为\(\mathcal{L}(\theta,\gamma,\phi;T)\),根据VAE中相关的公式的推导,我们可以得到如下公式:
等式右边第一项表示重构损失,它衡量模型在重构数据的准确性。第二项对应于均匀先验损失,它鼓励混合分布中所有成分的均衡贡献。第三项则是高斯损失,它评估潜在变量与模型中假设的高斯分布之间的吻合程度。
首先\(D_{KL}(q_\phi(\mathbf{r}|T) \Vert p_\gamma(\mathbf{r}|c))\)衡量两个高斯分布之间的Kullback-Leibler散度,可以表示如下
因此,我们可以对后验分布\(q_\phi(c|T)\)计算KL散度的期望,如下所示:
我们将\(q_\phi (c|T)\)定义为\(\mathbf{p}_{post}\),计算方式如下:
接下来,我们计算第二项,称为均匀损失,它可以重写如下:
在线轨迹序列异常检测#
基于上述的编码器-隐藏路径空间-解码器的GM-VSAE模型,训练完成之后,如何进行轨迹序列的异常检测呢?
我们知道,VAE对隐藏状态空间建模,给定输入\(x\)可以由编码器生成隐藏状态向量\(z\),然后\(z\)经过解码器又可以重构出一个和输入\(x\)相似的\(x'\),我们说这是因为\(x\)对应的隐藏状态向量\(z\)服从隐藏状态空间\(p(z)\)分布,所以从\(p(z)\)中采样又能恢复出\(x'\)来。
同理,如果一个轨迹序列\(T\)是正常的,那么其经过编码器编码而成的隐藏路径\(r\)必定服从隐藏状态空间分布\(p_\gamma(\mathbf{r},c)\),因此当解码器解码\(r\)时也能够恢复出一条与\(T\)相似的序列\(T'\)。如此,计算\(T\)和\(T'\)的相似度即可判定该序列是否异常。
但是,上述判定方式仅适合用于离线轨迹序列异常检测,在离线的情况下,轨迹序列\(T\)已经采集完毕。但是在在线的情况下,轨迹序列是实时生成的,比如在出租车行驶的过程中采集实时的轨迹序列数据,此时如何进行异常检测呢?
在GM-VSAE中,对隐藏状态空间建模为\(p(\mathbf{r},c)\),其含义即为:一共有\(C\)个类型的隐藏路径,每类隐藏路径\(r\)都服从高斯分布\(p_\gamma(r|c)\),均值为\(\mu_c\),标准差为\(\sigma_c\)。所以我们可以使用其均值\(\mu_c\)来作为\(\mathbf{r}\)的近似替代。在线异常检测时,无需使用编码器来获得\(r\),而是使用\(\mu_c\)来作为\(r\),那么我们只需要用\(C\)个\(\mu_c\),通过解码器计算当前的序列的概率即可实时判定该序列是否为异常:
进一步的,可写出如下更为详细的计算公式:
4. 代码示例#
我们以Notebook的形式,使用TrajDL实现了GM-VSAE算法的训练和推理,参见GM-VSAE代码实践。
Tip
本文介绍了轨迹序列异常检测任务。
本文介绍了GM-VSAE的原理部分,针对论文中的公式作近一步更为详细的推导。